Koło zębate

Koło zębate – element czynny przekładni zębatej oraz element innych mechanizmów takich jak sprzęgło zębate, pompa zębata i innych.
W skład koła zębatego wchodzą:
- wieniec zębaty
- piasta
- łącznik (łączący piastę i wieniec)[1].
W niektórych kołach zębatych, szczególnie tych o niewielkiej liczbie zębów i małej średnicy, nie występuje łącznik, a wieniec zębaty spełnia jednocześnie rolę piasty. Takiego rodzaju koło zębate nazywa się zębnikiem. Zębnik często nacięty jest bezpośrednio na wale i tworzy z nim integralną całość[2] lub osadzony jest na nim za pomocą połączenia wciskowego[3].
Wieniec zębaty składa się z zębów i wieńca, z którego zęby wystają. Przestrzenie pomiędzy zębami nazywane są wrębami[4].
Parametry koła zębatego

- – liczba zębów
- – średnica podziałowa
- średnica okręgu, na którym szerokość wrębu jest równa grubości zęba
- – średnica wierzchołkowa
- średnica okręgu przechodzącego przez wierzchołki zębów
- – średnica stóp
- średnica okręgu przechodzącego przez dna wrębów
- – średnica koła zasadniczego
- średnica wyobrażalnego koła, z którego rozwijane są zarysy ewolwentowe boków zębów
- – podziałka obwodowa
- odległość jednoimiennych boków zębów mierzona na łuku koła podziałowego
- – podziałka zasadnicza
- podziałka mierzona wzdłuż łuku koła zasadniczego
- – moduł zęba
- parametr charakteryzujący wielkość zębów koła zębatego. Moduły kół współpracujących muszą być takie same. Moduł zęba jest wielkością znormalizowaną przez Polską Normę PN/M-88502. Oblicza się go ze wzoru
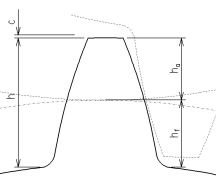
- – wysokość zęba
- suma wysokości głowy i stopy zęba
- – wysokość głowy zęba
- – wysokość stopy zęba
- – współczynnik wysokości zęba
- wysokość głowy zęba wyrażona w krotności modułu
- zęby normalne stosowane w większości przekładni zębatych
- zęby niskie stosuje się w przekładniach zębatych stożkowych o zębach łukowych, w których koło małe ma niewielką liczbę zębów (od 5 do 10), w przekładniach ślimakowych, w sprzęgłach zębatych, w ewolwentowych połączeniach wielowypustowych
- zęby wysokie stosowane w pompach zębatych.
- – współczynnik korekcji
- przesunięcie zarysu odniesienia przy wykonywaniu koła zębatego wyrażone w krotności modułu
- koło niekorygowane
- odsunięcie zarysu odniesienia np. dla uniknięcia podcinania zębów
- dosunięcie zarysu odniesienia[4]
- – luz wierzchołkowy
- zwykle 0,2–0,25 modułu[5]





















Kształt linii zęba
- zęby proste
- zęby śrubowe
- zęby daszkowe (w przekładniach walcowych)
- zęby krzywoliniowe (w przekładniach stożkowych)[4]
Mechanika zazębienia


Podczas obrotu kół dwa współpracujące zęby otaczają się jednocześnie także, ślizgając się po sobie. Ten poślizg jest niekorzystnym, lecz niemożliwym do uniknięcia zjawiskiem. Tylko w bardzo wąskim zakresie, który teoretycznie sprowadza się do jednego punktu występuje czyste toczenie się zębów bez poślizgu. Punkt ten nazywa się punktem tocznym, który wyznacza koło toczne o średnicy Koła toczne dla obu współpracujących kół są styczne w punkcie



Punkty styku zębów w czasie obrotu układają się na odcinku ( ) zwanym odcinkiem przyporu. Kąt zawarty między tym odcinkiem a linią styczną do kół tocznych w punkcie tocznym jest zwany kątem przyporu i jest jednocześnie parametrem ewolwenty. Zarys nominalny, powszechnie używany w budowie maszyn i przyjęty przez praktycznie wszystkie normy na całym świecie ma kąt przyporu Jednocześnie dla zarysu nominalnego średnice podziałowe kół pokrywają się z kołami tocznymi[4].




Obliczenia wytrzymałościowe
Ze względu na złożoność zjawisk zachodzących w uzębieniu niemożliwe jest stworzenie analitycznej metody obliczania wytrzymałości zęba. Tradycyjnie stosowane są tu metody parametryczne, które pozwalają uwzględnić szereg parametrów pracy przekładni takich jak – przenoszona moc, prędkość kół, wielkość, przełożenia, liczba zębów, intensywność pracy, rodzaj smarowania oraz chłodzenia itp. parametry związane są empirycznymi formułami i w ostateczności pozwalają na obliczenie minimalnego wymaganego modułu zęba.
Współczesna technologia dostarcza komputerowych metod modelowania zjawisk wewnątrz obciążonych części maszyn, także i kół zębatych, co znacznie ułatwia przeprowadzenie ewaluacji konstrukcji.
Szczególnym przypadkiem kół zębatych są:
- koła w kształcie owalu albo serca stosowane w przekładniach o przełożeniu zmiennym w czasie każdego obrotu, które mimo odmiennego kształtu są nazywane kołami zębatymi
- koła przekładni łańcuchowej o zmiennym przełożeniu składające się z ruchomych segmentów
- wycinek koła stosowany w przekładniach o niepełnym obrocie np. w mechanizmie podniesienia działa.
Obliczenia wytrzymałościowe dla koła zębatego walcowego prostego:
- Obliczenie modułu z warunku na zginanie
- Obliczenie modułu z warunku na naciski powierzchniowe
- Dobór modułu według tablicy
- Obliczenie pozostałych parametrów koła zębatego
Obliczenia
0. Zaczynamy od określenia danych wstępnych:

- – przełożenie,


gdzie:
- (współczynnik nadwyżek dynamicznych, zależy od prędkości obwodowej koła),
- lub (współczynnik zależny od liczby przyporu),
- (współczynnik przeciążenia zależny od warunków pracy).




1. Moduł z warunku na zginanie:
- – średnica podziałowa,
- – szerokość wieńca,
![{\displaystyle m\geqslant {\sqrt[{3}]{\tfrac {2M_{o}\cdot q}{\lambda \cdot z_{1}\cdot k_{gj}}}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2e69ce0aa88adf2cd97bf66b14027d6788dcfbc6)



gdzie:
- – z tablic.



2. Obliczanie zębów na naciski powierzchniowe:

gdzie:
- – moduły Younga materiałów uzębień w MPa,
- – kąt przyporu,
- – siła nacisku kół na siebie,
- – tzw. czynna szerokość uzębienia (grubość koła) w mm,
- – przełożenie[4].



Obróbka uzębień

| Zobacz multimedia związane z tematem: Koło zębate |
 | Zobacz hasło koło zębate w Wikisłowniku |
Występuje wiele metod kształtowania uzębień[6][7] kół zębatych wykonanych z metalu:
- kształtowe
- frezowanie frezem modułowym krążkowym
- frezowanie frezem palcowym
- dłutowanie
- struganie
- przeciąganie
- wycinanie elektroerozyjne (obróbka elektroerozyjna – WEDM)
- kopiowe
- struganie według kopiału
- obwiedniowe
- dłutowanie metodą Maaga
- dłutowanie metodą Fellowsa
- struganie metodą Sunderlanda
- frezowanie obwiedniowe frezem ślimakowym walcowym lub globoidalnym
- frezowanie frezem ślimakowym stożkowym
- frezowanie głowicą frezową z zębami ustawionymi według okręgu
- frezowanie głowicą frezową z zębami ustawionymi według spirali (spiral) Archimedesa
Koła zębate z tworzyw sztucznych wykonywane są głównie metodą wtryskiwania.
Zobacz też
Przypisy
- ↑ PiotrP. Chwastyk PiotrP., Podstawy projektowania inżynierskiego. Przekładnie zębate cz. 1 [online], 19 grudnia 2017, slajd 2 .
- ↑ Koła zębate [online], 19 grudnia 2017 .
- ↑ AndrzejA. Rutkowski AndrzejA., Części maszyn, wyd. szóste, Warszawa: Wydawnictwa Szkolne i Pedagogiczne, s. 83 .
- ↑ a b c d e Przekładnie zębate, [w:] AndrzejA. Rutkowski AndrzejA., Części maszyn, wyd. szóste, Warszawa: Wydawnictwa Szkolne i Pedagogiczne, s. 254–298 .
- ↑ JacekJ. Czarnigowski JacekJ., Podstawy konstrukcji maszyn. Wykład 8. Przekładnie zębate cz. 1 [online], 19 grudnia 2017, slajd 5 [dostęp 2017-12-19] [zarchiwizowane z adresu 2018-10-24] .
- ↑ Piotr Cichosz: Narzędzia skrawające. Warszawa: WNT, 2006.
- ↑ A. Kampa: Technologia maszyn. Wykład 3.. [dostęp 2010-10-01]. (pol.).
Encyklopedia internetowa:
- Britannica: technology/gear
- Treccani: ingranaggio
- Universalis: engrenages
- SNL: tannhjul
- Catalana: 0102536
- DSDE: tandhjul











