Moment siły







Moment siły[a] względem punktu O – iloczyn wektorowy promienia wodzącego o początku w punkcie O i końcu w punkcie przyłożenia siły oraz siły [1]:




Wektor momentu siły jest wektorem osiowym (pseudowektorem), zaczepiony jest w punkcie O, a jego kierunek jest prostopadły do kierunku płaszczyzny wyznaczonej przez wektor i promień wodzący

Określa się także moment siły względem osi, jest on równy rzutowi wektora momentu siły na tę prostą. Współrzędne wektora nazywają się momentami siły względem odpowiednich osi



Jednostką momentu siły jest niutonometr [Nm]. Jednostka ta jest zdefiniowana analogicznie jak dżul, czyli jednostka energii. Aby unikać nieporozumień, nie nazywa się niutonometra dżulem.
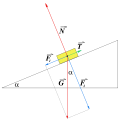
W przypadku dźwigni dwustronnej o nierównych ramionach pozostanie ona w równowadze, gdy wartości momentów sił przyłożone do obu ramion będą równe, a ściślej, gdy suma wektorów momentów będzie równa zeru:


W przypadku pokazanym na rysunku, gdy siły i są prostopadłe do wektorów i





Związek z mocą
Znając moc obracającego się urządzenia i jego prędkość kątową można wyznaczyć moment siły, ponieważ




gdzie:
- – praca,
- – ramię przyłożenia siły, mierzone od osi obrotu urządzenia.


W ten sposób można wyznaczyć na przykład moment obrotowy wału.
Zobacz też
Uwagi
- ↑ W inżynierii stosuje się terminy „moment obrotowy”, „moment skręcający” i inne.
Przypisy
- ↑ moment siły, [w:] Encyklopedia PWN [dostęp 2023-11-21] .
Linki zewnętrzne
- Moment siły. www.solveredu.com.
- p
- d
- e
Mechanika klasyczna
| Działy |
|
|---|---|
| Sformułowania | |
| Koncepcje podstawowe |
|
| Podstawowe zagadnienia |
|
| Znani uczeni |
Kontrola autorytatywna (wielkość fizyczna):
Encyklopedia internetowa:
- Britannica: science/torque
- SNL: dreiemoment, torsjonsmoment, kraftmoment
- Catalana: 0236451
- DSDE: drejningsmoment









