Prędkość
 | Ten artykuł dotyczy definicji prędkości w kinematyce punktu materialnego . Zobacz też: inne znaczenia. |
| Rodzaj wielkości | wektorowa lub skalarna | ||
|---|---|---|---|
| Symbol |
| ||
| Jednostka SI | |||
| W podstawowych jednostkach SI |
| ||
| Inne jednostki | |||
| Wymiar |
| ||
| |||






Prędkość – wielkość fizyczna opisująca szybkość zmiany położenia ciała względem układu odniesienia. Prędkość jest podstawową koncepcją kinematyki, gałęzi mechaniki klasycznej opisującej ruch ciał.
Prędkość może określać:
- wektorową wielkość fizyczną wyrażająca zmianę wektora położenia w jednostce czasu,
- skalarną wielkość oznaczającą przebytą drogę w jednostce czasu zwaną szybkością.
Jednostką prędkości w układzie SI jest metr na sekundę (m/s).
Definicje prędkości
Prędkość w ruchu prostoliniowym
Dla ruchu wzdłuż prostej prędkość definiuje się jako pochodną przesunięcia po czasie[1], czyli granicę przyrostów przesunięcia do przyrostu czasu w jakim nastąpił ten przyrost, dla nieskończenie małego przyrostu czasu:

Prędkość ta zwana jest prędkością chwilową, w przeciwieństwie do prędkości średniej wyznaczonej dla dłuższego odcinka.
Prędkość wektorowa

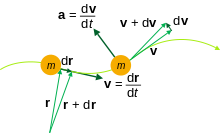
Prędkość wektorowa średnia określana jest jako iloraz zmiany wektora położenia do czasu, w jakim ta zmiana nastąpiła, co można określić wzorem[2]:


Wynikającą z tego zmianę położenia określa wzór:

Gdy odstęp czasu, w którym wyznacza się prędkość średnią, zmniejsza się, iloraz wektora zmiany położenia do czasu, w którym ta zmiana nastąpiła, dąży do pewnego wektora granicznego zwanego prędkością ciała w danym punkcie lub prędkością chwilową. Definicję tę można wyrazić wzorem[2]:

Prędkość jest pochodną wektora położenia względem czasu i jest wielkością wektorową, może być rozłożona na składowe, mające kierunek osi współrzędnych, podobnie wektor elementarnej zmiany położenia może być rozłożony na współrzędne[2]

Wektor prędkości chwilowej jest równoległy do wektora zmiany położenia, przez co wektor prędkości chwilowej jest styczny do toru ruchu ciała[2].
Prędkość jako wielkość niewektorowa
W wielu przypadkach prędkość rozumiana jest jako stosunek drogi do czasu jej przebycia. Tak jest rozumiana intuicyjnie, a także w wielu problemach fizycznych[2]

Przy czym droga jest rozumiana jako długość odcinka krzywej (toru), po której porusza się ciało, od punktu początkowego do końcowego ruchu. Jeżeli prędkość zmienia się, to droga jest równa sumie małych odcinków drogi, na których uznaje się, że prędkość jest stała i jest określana jako prędkość chwilowa[3]:


Droga przebyta w niewielkim odcinku czasu, w którym prędkość nie zmienia się, jest proporcjonalna do prędkości i czasu. Droga przebyta gdy zmienia się prędkość może być obliczona jako suma, a w granicy jako całka, dróg na odcinkach, na których prędkość nie zmienia się:

Stąd też prędkość średnia:

Prędkość chwilowa niewektorowa jest równa modułowi (wartości) prędkości chwilowej wektorowej[3]

Średnia prędkość niewektorowa jest większa lub równa modułowi średniej prędkości wektorowej. Równość zachodzi tylko wtedy, gdy tor jest prostoliniowy

Prędkość w różnych układach współrzędnych
Układ współrzędnych kartezjańskich
W układzie współrzędnych kartezjańskich trzy składowe prędkości (w przestrzeni) albo dwie (na płaszczyźnie) wyrażone są takimi samymi wzorami jak prędkości w ruchu prostoliniowym, przy czym drogą jest w tym przypadku współrzędna danej osi:

Prędkość można zapisać jako współrzędne wektora
![{\displaystyle {\vec {v}}=[v_{x},v_{y},v_{z}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/24a883d17ef466cf0b4aaf2cc755f690d54f6f42)
lub z użyciem wersorów osi

Wartość prędkości dana jest wzorem:

Układ współrzędnych biegunowych
Układ współrzędnych biegunowych na płaszczyźnie są dwie współrzędne, promień wodzący i amplituda punktu będąca kątem między wybranym kierunkiem a danym.


W układzie tym prędkość można określić poprzez transformację do kartezjańskiego układu współrzędnych o początku będącym początkiem układu biegunowego i zorientowanego względem zerowej amplitudy albo przez wyznaczenie kartezjańskiego układu współrzędnych o kierunku zgodnym z promieniem wodzącym. Transformacje określają wzory[4]:
- prędkość radialna – prędkość zmiany długości promienia wodzącego

- prędkość transwersalna – prędkość zmiany położenia w kierunku prostopadłym do promienia wodzącego

Co można wyrazić przez prędkość kątową


gdzie jest kątem mierzonym od ustalonego kierunku.

Prędkość całkowita:

Wartość prędkości całkowitej[4]:

Układ współrzędnych walcowych
Układ współrzędnych walcowych, jest uogólnieniem układu biegunowego na przestrzeń trójwymiarową poprzez dodanie do współrzędnych biegunowych współrzędnej w kierunku osi z. Współrzędna z jest liniowa, odpowiadająca jej składowa prędkości jest równa:

Transformacja do kartezjańskich współrzędnych prędkości określa wzór:

Wartość prędkości:

Układ współrzędnych sferycznych
W układzie współrzędnych sferycznych położenie w przestrzeni opisane jest przez współrzędne: promień wodzący, długość azymutalna i odległość zenitalna Wprowadzając układ kartezjański o kierunkach osi zgodnych ze zmianami współrzędnych sferycznych, transformacja współrzędnych prędkości wyraża się wzorami:


gdzie:
- jest kątem mierzonym od ustalonego kierunku, np. od osi (OZ),
- jest kątem, jaki tworzy rzut wektora wodzącego z ustalonym kierunkiem na płaszczyźnie prostopadłej do kierunku pierwszej osi (OZ). Tym kierunkiem może być oś OX.

Współrzędne prędkości w wyżej opisanym kartezjańskim układzie współrzędnych:

Moduł (wartość) prędkości:

Dowolne współrzędne krzywoliniowe
Z definicji prędkość jest równa pochodnej promienia wodzącego względem czasu: Aby wyrazić prędkość we współrzędnych krzywoliniowych, obliczamy tę pochodną według reguły różniczkowania funkcji złożonej, mając na uwadze, że promień wodzący poruszającego się punktu można uważać za funkcję współrzędnych krzywoliniowych tego punktu, które z kolei są pewnymi funkcjami czasu t[5]:




(1) |

Stąd
(2) |

oraz
(3) |

gdzie wskaźniki i przebiegają niezależnie od siebie wszystkie wartości od 1 do 3. W przypadku układu ortogonalnego jest[5]


- dla


i dzięki temu
(4) |

Jeżeli promień wodzący przedstawiony jest jako funkcja zmiennych to wzory na prędkość przybiorą postać[5]


(5) |

(6) |
![{\displaystyle v^{2}=\sum _{\sigma =1}^{3}\left[\left({\frac {\partial x}{\partial q_{\sigma }}}\right)^{2}+\left({\frac {\partial y}{\partial q_{\sigma }}}\right)^{2}+\left({\frac {\partial z}{\partial q_{\sigma }}}\right)^{2}\right]{\dot {q}}_{\sigma }^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d39c491575a8e9e04954d1568ce57105870cb816)
Definicja wersorów: osi wzorem

(7) |

Prędkość można teraz zapisać w postaci
(8) |

w której jest składową prędkości wzdłuż osi


Prostopadły rzut prędkości na oś jest równy

(8) |

Ze wzoru (3) wynika równość

skąd wynika, że

Rzut prostopadły prędkości określa wzór[5]
(9) |

Związek z przyspieszeniem

Szybkość zmiany prędkości to przyspieszenie:

Z zależności tej wynika wyrażenie na prędkość w zależności od przyspieszenia:

W ruchu prostoliniowym:

Na wykresie zależności prędkości od czasu chwilowe przyspieszenie ciała w danym momencie jest równe nachyleniu linii stycznej do krzywej w tym punkcie.
Prędkość kątowa
 Osobny artykuł: Prędkość kątowa.
Osobny artykuł: Prędkość kątowa.

W ruchach krzywoliniowych definiowana jest prędkość kątowa
gdzie jest kątem obrotu wokół pewnej osi ustalonej osi. Traktując jako kąt skierowany, można przypisać prędkości kątowej kierunek osi obrotu i zwrot zgodny z regułą śruby prawoskrętnej

Tak zdefiniowana prędkość kątowa jest pseudowektorem. Pomiędzy prędkością kątową a prędkością transwersalną zachodzi następujący związek

Przykłady prędkości w różnych rodzajach ruchów
Zmiany prędkości są podstawą klasyfikacji ruchów w fizyce.
Prędkość liniowa w ruchu jednostajnym prostoliniowym
Prędkość w ruchu jednostajnym prostoliniowym jest stała (zarówno jej kierunek i wartość). Przyjmuje się odtąd, że do położenia ciała wystarczy jedna współrzędna Każdy ruch prostoliniowy można przez odpowiednie obroty układu współrzędnych, sprowadzić do przypadku jednowymiarowego. Prędkość w ruchu jednostajnym prostoliniowym określa więc następująca zależność:



gdzie:
- – wektor położenia jako funkcja czasu
- – przebyta droga,
- – czas trwania ruchu,
- – funkcja położenia (skalar) od czasu.





Prędkość liniowa w ruchu jednostajnie przyspieszonym
Przyspieszenie jest stałe i niezerowe, więc prędkość zmienia się. W ruchu tym także można ograniczyć się do rozpatrywania jednej współrzędnej.




gdzie:
- – całkowity czas ruchu,
- – wektor prędkości jako funkcja czasu.

Czasem (zazwyczaj z powodów dydaktycznych) wyróżnia się specjalny przypadek ruchu jednostajnie przyspieszonego prostoliniowego – ruch jednostajnie opóźniony prostoliniowy. W ruchu tym wektor przyspieszenia jest stały i skierowany przeciwnie do wektora prędkości

Ruch jednostajny po okręgu (prędkość kątowa)
W tym ruchu wektor prędkości kątowej jest stały i jego wartość wyraża się wzorem:


Prędkość w ruchu po okręgu też jest stała i wiąże się z prędkością kątową wzorem

Znajomość prędkości kątowej umożliwia zapisanie równań ruchu po okręgu we współrzędnych kartezjańskich


Zobacz też
Przypisy
- ↑ prędkość, [w:] Encyklopedia PWN [dostęp 2024-03-17] .
- ↑ a b c d e Wróblewski i Zakrzewski 1984 ↓, s. 84.
- ↑ a b Wróblewski i Zakrzewski 1984 ↓, s. 84–86.
- ↑ a b JerzyJ. Kwela JerzyJ., Mechanika klasyczna i relatywistyczna, Gdańsk: Wydawnictwo Uniwersytetu Gdańskiego, 2010, ISBN 978-83-7326-703-9 [dostęp 2019-08-19] [zarchiwizowane z adresu 2019-08-19] .
- ↑ a b c d G.K. Susłow, Mechanika teoretyczna, PWN, Warszawa 1960.
Bibliografia
- Andrzej Kajetan Wróblewski, Janusz A. Zakrzewski: Wstęp do fizyki. Warszawa: Państwowe Wydawnictwo Naukowe, 1984. ISBN 83-01-01359-1.
- p
- d
- e
| pojęcia podstawowe |
| ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| wielkości |
| ||||||||||
| przyrządy pomiarowe |
| ||||||||||
| rodzaje ruchu |
| ||||||||||
| przykłady | |||||||||||
| pojęcia matematyczne |
| ||||||||||
| powiązane obszary kultury |
|
- p
- d
- e
| Działy |
|
|---|---|
| Sformułowania | |
| Koncepcje podstawowe |
|
| Podstawowe zagadnienia |
|
| Znani uczeni |
Kontrola autorytatywna (wielkość wektorowa):
Encyklopedia internetowa:
- Britannica: science/velocity, science/average-velocity, science/instantaneous-velocity
- Treccani: velocita
- SNL: hastighet
- Catalana: 0269741
- DSDE: hastighed









