Przyspieszenie
 | Ten artykuł od 2018-03 wymaga zweryfikowania podanych informacji. Należy podać wiarygodne źródła w formie przypisów bibliograficznych. Część lub nawet wszystkie informacje w artykule mogą być nieprawdziwe. Jako pozbawione źródeł mogą zostać zakwestionowane i usunięte. Sprawdź w źródłach: Encyklopedia PWN • Google Books • Google Scholar • Federacja Bibliotek Cyfrowych • BazHum • BazTech • RCIN • Internet Archive (texts / inlibrary) Dokładniejsze informacje o tym, co należy poprawić, być może znajdują się w dyskusji tego artykułu. Po wyeliminowaniu niedoskonałości należy usunąć szablon {{Dopracować}} z tego artykułu. |
| Rodzaj wielkości | wektorowa | ||
|---|---|---|---|
| Symbol |
| ||
| Jednostka SI | m/s², m·s−2 | ||
| W podstawowych jednostkach SI |
| ||
| Wymiar |
| ||
| |||
| |||






Przyspieszenie – wektorowa wielkość fizyczna wyrażająca zmianę wektora prędkości w czasie[1][2].
Przyspieszenie definiuje się jako pochodną prędkości po czasie, czyli jest szybkością zmiany prędkości[3]. Jeśli przyspieszenie jest skierowane przeciwnie do zwrotu prędkości ruchu, to wartość prędkości w tym ruchu maleje, a przyspieszenie to jest wtedy nazywane opóźnieniem.
Definicja

Jeżeli dany wektor określa położenie punktu materialnego, a wektor określa prędkość tego punktu, to jego przyspieszenie jest pochodną prędkości po czasie:




Ponieważ prędkość z kolei jest pochodną położenia po czasie, to przyspieszenie można zapisać jako drugą pochodną położenia po czasie:

Jednostką przyspieszenia w układzie SI jest metr na sekundę do kwadratu.
![{\displaystyle [{\vec {a}}]=\mathrm {\frac {m}{s^{2}}} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/58805475beaf02df3d8e0e254c0117d8c4bee28a)
Związek z dynamiką
Zgodnie z drugą zasadą dynamiki przyspieszenie ciała jest proporcjonalne do wypadkowej siły działającej na to ciało i odwrotnie proporcjonalne do masy ciała Kierunek i zwrot przyspieszenia pokrywa się z kierunkiem i zwrotem siły Wzór wyrażający tę zależność ma postać




W ruchu prostoliniowym
W ruchu po linii prostej kierunek prędkości jest ustalony, więc można ją traktować tak jak wielkość skalarną. Wówczas przyspieszenie określa wzór:

W ruchu jednostajnie zmiennym
Gdy przyspieszenie jest stałe (), wzór definicyjny przybiera postać


gdzie jest przyrostem prędkości w czasie


Przyspieszenie w ruchu krzywoliniowym
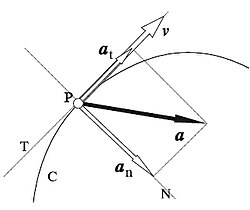


Jeżeli punkt porusza się po torze krzywoliniowym[4], wówczas jego całkowite przyspieszenie może być rozłożone na dwie składowe: prostopadłą do toru ruchu zwaną przyspieszeniem dośrodkowym lub normalnym (oznaczanym ) i składową równoległą do toru, zwaną przyspieszeniem stycznym (ozn. ).


Wektor przyspieszenia całkowitego jest sumą jego składowych – normalnej i stycznej


Składowe – styczna i normalna – są wzajemnie prostopadłe i dlatego wartość przyspieszenia całkowitego jest równa:

Przyspieszenie dośrodkowe (normalne)
 Osobny artykuł: Przyspieszenie dośrodkowe.
Osobny artykuł: Przyspieszenie dośrodkowe.

Jest to składowa przyspieszenia prostopadła do toru ruchu. Reprezentuje tę część przyspieszenia, która wpływa na zmianę kierunku prędkości, a zatem na kształt toru, ale nie wpływa na zmianę wartości prędkości[5]. Jeżeli prędkość chwilowa oznaczona jest jako a chwilowy promień zakrzywienia toru (promień okręgu stycznego do toru, czyli promień krzywizny toru) ruchu wynosi to wartość przyspieszenia dośrodkowego ciała jest równa:



Przyspieszenie styczne
Jest to składowa przyspieszenia styczna do toru ruchu, powodująca zmianę wartości prędkości, ale nie powodująca zmiany kierunku ruchu. Stosując oznaczenie dla wartości prędkości chwilowej i oznaczenie dla drogi pokonanej przez ciało, przyspieszenie styczne określają wzory:



Przyspieszenie kątowe
Przyspieszenie kątowe ciała jest wielkością opisującą jego ruch obrotowy, utworzoną analogicznie do przyspieszenia liniowego, tylko wyrażoną w wielkościach kątowych. Jest pseudowektorem leżącym na osi obrotu i skierowanym zgodnie z regułą śruby prawoskrętnej. Jeśli współrzędną kątową ciała określa kąt a oznacza jego prędkość kątową, to wartość przyspieszenia kątowego określa wzór



![{\displaystyle \varepsilon ={\frac {d\omega }{dt}}={\frac {d^{2}\alpha }{dt^{2}}}\quad [\varepsilon ]={\frac {1}{{\text{s}}^{2}}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f8daa048da5465337dcf4d5ead9028baf9601d62)
Jednostką przyspieszenia kątowego w układzie SI jest jeden radian przez sekundę do kwadratu.
Dowolne współrzędne krzywoliniowe
Niech współrzędne krzywoliniowe tworzą układ współrzędnych w przestrzeni Oznaczmy przez wersory kierunków stycznych do osi tego układu[1][6].



Jeżeli jest wektorem przyspieszenia, to jego rzuty na osie układu współrzędnych można zapisać wzorami

(1) |

Ponieważ

zatem
(2) |
![{\displaystyle a_{i}={\frac {d}{dt}}(\mathbf {v} \mathbf {e} _{i})-\mathbf {v} {\frac {d}{dt}}\mathbf {e} _{i}={\frac {1}{|\partial \mathbf {r} /\partial q_{i}|}}\left[{\frac {d}{dt}}\left(\mathbf {v} {\frac {\partial \mathbf {r} }{\partial q_{i}}}\right)-\mathbf {v} {\frac {d}{dt}}{\frac {\partial r}{\partial q_{i}}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cc8b3afc0fc7342538122b0ba5e060dcbac25e8a)
Na podstawie wzoru dla prędkości
(3) |

mamy
(4) |

i dzięki temu
(5) |

Mamy również
(6) |

oraz
(7) |

Z porównania prawych stron (5) i (6) wynika, że
(8) |

Mamy zatem
(9) |

Po podstawieniu (5) i (9) do (2) otrzymujemy następujące wzory dla rzutów wektora przyspieszenia na osie krzywoliniowego układu współrzędnych

(9) |
![{\displaystyle a_{i}={\frac {1}{|\partial \mathbf {r} /\partial q_{i}|}}\left[{\frac {d}{dt}}{\frac {\partial (v^{2}/2)}{\partial {\dot {q}}_{i}}}-{\frac {\partial (v^{2}/2)}{\partial q_{i}}}\right],\quad i=1,2,3.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c09f931865840e950da54e62c0edc84b7267194)
Pomiar
Do pomiaru służy przetwornik przyspieszenia nazywany przyspieszeniomierzem lub akceleromierzem czy akcelerometrem.
Zobacz też
Przypisy
- ↑ a b G.K. Susłow, Mechanika teoretyczna, PWN, Warszawa 1960.
- ↑ przyspieszenie, [w:] Encyklopedia PWN [dostęp 2021-10-15] .
- ↑ J. Awrejcewicz, Mechanika techniczna i teoretyczna, Wyd. Politechniki Łódzkiej, Łódź 2011.
- ↑ M. Paluch, Mechanika teoretyczna, Wyd. Politechniki Krakowskiej, Kraków 2006.
- ↑ R. Janiczek, Mechanika teoretyczna, Cz. 1, 2, 3, Wyd. Politechniki Śląskiej, Częstochowa 1979.
- ↑ Л.Г. Лойцянский, А.И. Лурье, Курс теоретической механики, Гос. Издат. Технико-теоретической литературы, Москва 1954.
- p
- d
- e
| pojęcia podstawowe |
| ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| wielkości |
| ||||||||||
| przyrządy pomiarowe |
| ||||||||||
| rodzaje ruchu |
| ||||||||||
| przykłady | |||||||||||
| pojęcia matematyczne |
| ||||||||||
| powiązane obszary kultury |
|
- p
- d
- e
| Działy |
|
|---|---|
| Sformułowania | |
| Koncepcje podstawowe |
|
| Podstawowe zagadnienia |
|
| Znani uczeni |
Kontrola autorytatywna (wielkość fizyczna):
Encyklopedia internetowa:
- Britannica: science/acceleration
- Treccani: accelerazione
- NE.se: acceleration
- SNL: akselerasjon
- DSDE: acceleration









